FDBACK: Feedback monitoring
Esta instrução implementa o monitoramento de feedback.
O estado do sinal da saída Q é verificado para ver se corresponde ao estado do sinal inverso da entrada de feedback FEEDBACK.
A saída Q vai para 1 assim que a entrada é ON = 1. O requisito para isso é que a entrada de feedback FEEDBACK = 1 e nenhum erro de feedback seja salvo.
A saída Q vai para 0, assim que a entrada ON = 0 ou se um erro de feedback for detectado.
Um erro de feedback ERROR = 1 é detectado se o estado do sinal inverso da entrada de feedback FEEDBACK (para a entrada Q) não seguir o estado do sinal da saída Q dentro do tempo máximo de feedback tolerável. O erro de feedback é salvo.
Se for detectada uma discrepância entre a entrada de feedback FEEDBACK e a saída Q após um erro de feedback, o erro de feedback é reconhecido de acordo com a atribuição de parâmetros de ACK_NEC:
• Se ACK_NEC = 0, a confirmação é automática.
• Se ACK_NEC = 1, você deve confirmar o erro de feedback com uma borda de subida na entrada ACK.
A saída ACK_REQ = 1, em seguida, sinaliza que uma confirmação do usuário é necessária na entrada ACK para confirmar o erro de feedback. Após uma confirmação, a instrução manda ACK_REQ para 0.
Para evitar que erros de feedback sejam detectados e reconhecimento seja necessário quando o FI/O controlado pela saída Q estiver passivado, você precisa alimentar a entrada QBAD_FIO com o sinal QBAD do status associado do FI/O ou do sinal QBAD_O_xx/valor invertido do canal associado.
A tabela a seguir mostra os parâmetros da instrução:
| Parâmetro | Declaração | Data type | Descrição |
|---|---|---|---|
| ON | Input | BOOL | 1 = Ativar saída |
| FEEDBACK | Input | BOOL | Entrada feedback |
| QBAD_FIO | Input | BOOL | Sinal QBAD do canal ou do módulo F-I/O |
| ACK_NEC | Input | BOOL | 1 = Reconhecimento necessário |
| ACK | Input | BOOL | Reconhecimento |
| FDB_TIME | Input | TIME | Tempo de feedback |
| Q | Output | BOOL | 1 = Enable, porta de segurança fechada |
| ERROR | Output | BOOL | Erro de feedback |
| ACK_REQ | Output | BOOL | Reconhecimento requerido |
| DIAG | Output | BYTE | Informações de serviço Non-fail safe |
Structure of DIAG
| Bit | Atribuição |
|---|---|
| 0 | Erro de feedback ou tempo de feedback incorreto |
| 1 | Erro QBAD_FIO |
| 2 | Após erro: entrada feedback em 0 permanentemente |
| 5 | ACK ativado permanentemente |
| 6 | Reconhecimento requerido |
| 7 | Estado da saída Q |
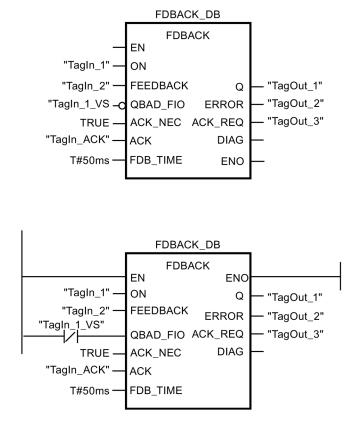
O exemplo a seguir mostra como funciona a instrução para F-CPUs S7-300/400:
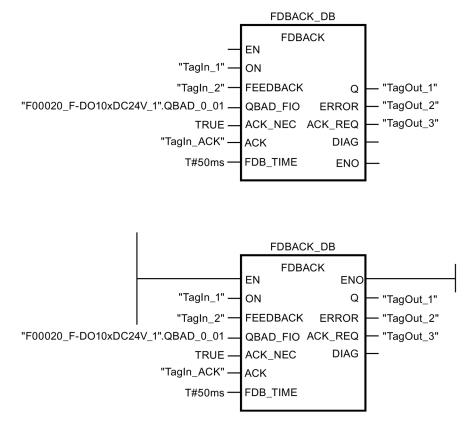
O exemplo a seguir mostra como funciona a instrução para F-CPUs S7-1200/1500:
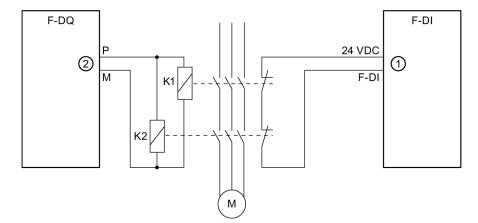
Exemplo de interconexão
Projeto Safety
• Abrir Main_Safety_RTG1 (FB1).
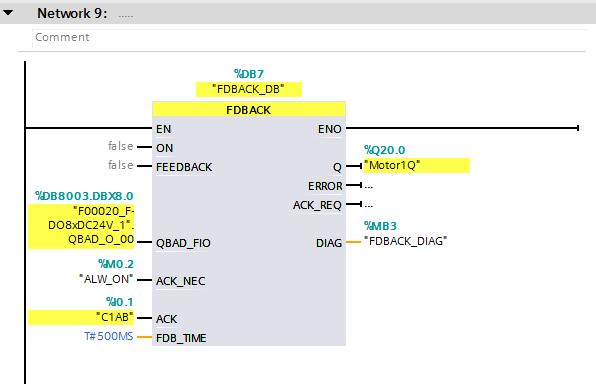
• Inserir a instrução FDBACK da subpasta Safety functions da task card Instructions na network 9.
• Definir o nome do Data block como EV1oo2DI_DB. Clicar em OK para confirmar a caixa de diálogo Call options .
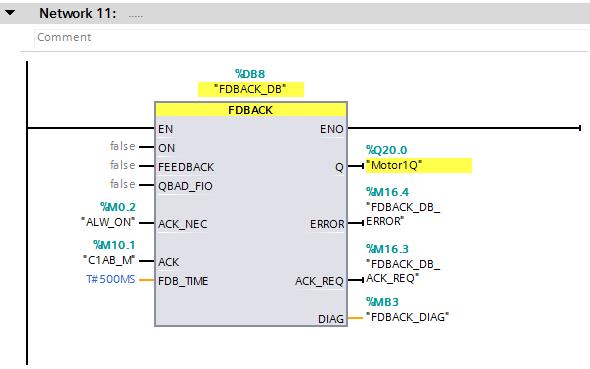
• Alimentar as entradas da instrução, conforme mostrado na figura baixo.
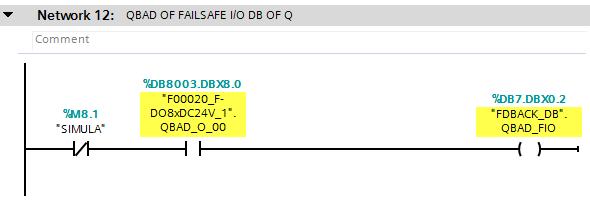
Network 12
O parâmetro QBDAD_FIO recebe o sinal QBAD do canal de saída digital 0 do módulo F00020_F-DO8xDC24V_1 quando o sistema não está em simulação. Quando está simulando (SIMULA = 1), o sinal QBAD é ignorado (sempre em 0).
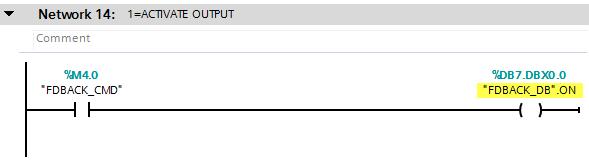
Networks 13 e 14
• A variável FDBACK_SIM determina se o feedback do bloco FDBACK está em simulação ou não. Quando não está em simulação (FDBACK_SIM = 0), o parâmetro de entrada FEEDBACK recebe o valor da variável Motor1K1_M (correspondente à entrada digital). Quando está em simulação (FDBACK_SIM = 1), o parâmetro de entrada FEEDBACK recebe o valor do parâmetro Q do bloco FDBACK (realimentação com o valor de comando para o motor (saída digital).
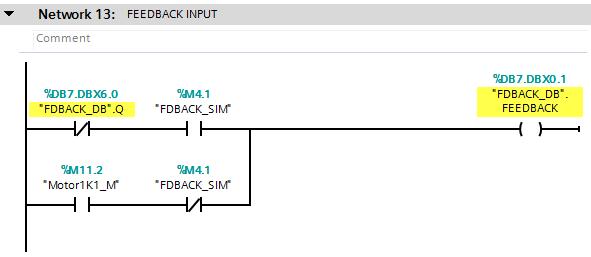
• FDBACK_CMD recebe o comando do operador de girar/parar o motor.
• Testar instrução FDBACK.
Próximo